By Miya Pavlock McAuliffe (Physical Oceanography Lab) and Marcel Peliks (Geological Oceanography Lab)
As a part of our Habitat Mapping Class this semester we undertook the mission of learning the ins and outs of seafloor mapping theory and practice to make our new Kongsberg M3 Multibeam system work. The M3 is a seafloor mapping system that has excited a lot of folks at MLML with its potential to collect geological, physical, and even biological data beneath the surface of the water. It depends upon many sensors as well as software, and right off the bat we would like to thank QPS for donating us a license to QINSY for data acquisition and Qimera for data processing! Another part of this project involved entering a National Geographic competition...which we’ll revisit later in this post.

First, we must discuss the scientific questions we hope to address. We are a part of the Geological Oceanography lab and are interested in the mysterious submarine landslides that occur, starting at the head of the Monterey Canyon. A lot of research by the Monterey Bay Aquarium Research Institute (MBARI) and California State University’s Seafloor Mapping Lab (SFML) have used deep water mapping technology and other high-tech equipment to study the canyon in the deep.
From these studies, we know that massive underwater landslides occur periodically at the edges of the canyon, and have been shown to move sand, mud, and rocks miles down. We aren’t sure why they happen and they don’t seem to match up with earthquakes or storms. Our hypotheses have to do with how sediment builds up at the head of the canyon and if it is connected to the longshore sediment transport system around the Monterey Bay. Does a submarine landslide occur following a large loss of sand on the beach? Are we losing beach sand to the belly of the canyon, forever? Can we correlate submarine landslide events with any other phenomena? In order to test our hypotheses we must map the head of the canyon more frequently than ever before and the M3 is a perfect instrument to allow us to do so.
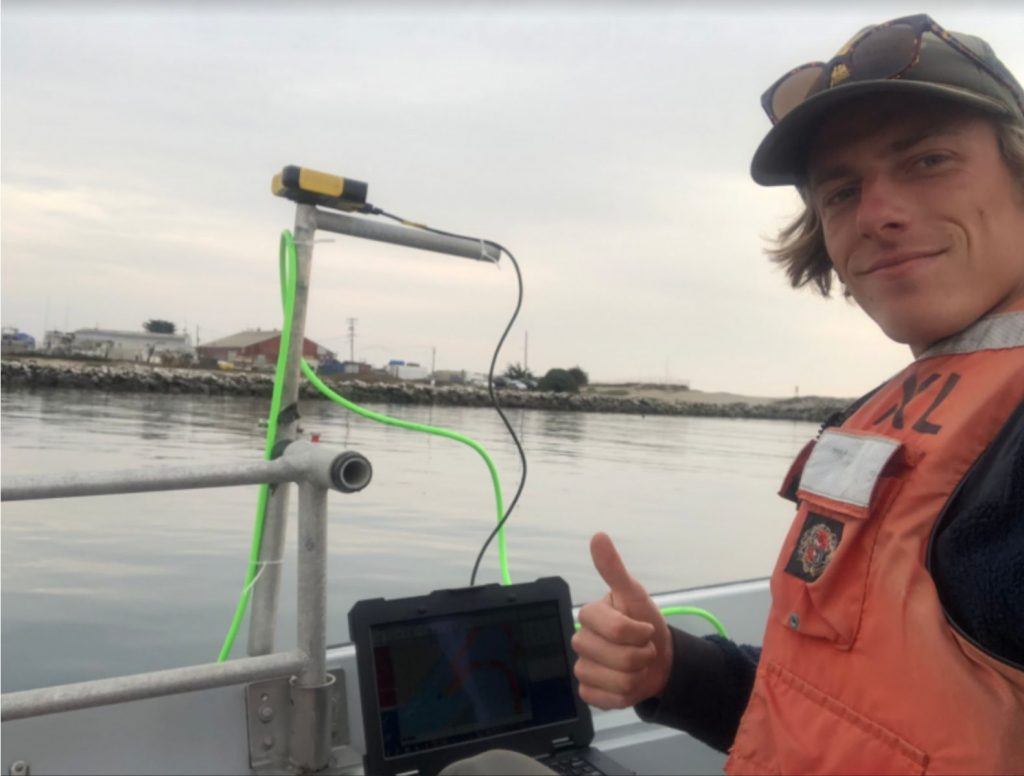 Along the way, the MLML “Shop Guys” built us a pole mount to attach the M3 to a MLML whaler, a boat that we can take out to the canyon and survey within an hour or two. Dr. Ivano Aiello brought the M3 to the lab and QPS supplied the software to be able to acquire and process data. Dr. Tom Connolly supplied a field laptop that is water resistant, has a bright enough screen to beat the sun, and has a fantastic battery life, and we brought student brains that figured the rest out. This meant lots of reading manuals, troubleshooting, and more troubleshooting. When we couldn’t troubleshoot alone anymore, Pat Iampietro from CSUMB helped us through a major sticking point with his expertise. The wonderful community and affiliates of Moss Landing Marine Labs were integral to our journey the past few months.
Along the way, the MLML “Shop Guys” built us a pole mount to attach the M3 to a MLML whaler, a boat that we can take out to the canyon and survey within an hour or two. Dr. Ivano Aiello brought the M3 to the lab and QPS supplied the software to be able to acquire and process data. Dr. Tom Connolly supplied a field laptop that is water resistant, has a bright enough screen to beat the sun, and has a fantastic battery life, and we brought student brains that figured the rest out. This meant lots of reading manuals, troubleshooting, and more troubleshooting. When we couldn’t troubleshoot alone anymore, Pat Iampietro from CSUMB helped us through a major sticking point with his expertise. The wonderful community and affiliates of Moss Landing Marine Labs were integral to our journey the past few months.
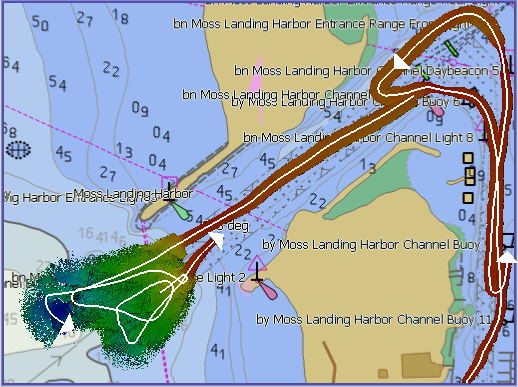
Though we’ve had many challenges throughout the semester, we’ve succeeded in conducting some promising preliminary surveys with the equipment we have available: the field laptop, a Trimble ProXH GPS, and our M3. We’ve collected preliminary data in the Moss Landing Harbor as well as the head of the Monterey Submarine Canyon. See a map of some preliminary depths below:
Still, we are in need of a few additional sensors to make any data collected with our system truly scientifically sound, including something called a Motion Reference Unit (MRU) and a gyro compass. Seafloor mapping draws from the fact that sound travels about five times faster in water than in air. The M3 is a transducer --or speaker-- that emits sound toward the seafloor, listens for the return, and calculates the two-way travel time to infer the depth of the seafloor below the boat.
Therefore, you must supply tide information (tide info found from NOAA tide gauges online), speed of sound information (which we do not yet have a way of measuring), information of the boat due to waves, as well as precise position information. An MRU would provide very precise information regarding the motion of the boat due to the motion of the ocean. Without athese measurements, we can’t be sure if the depths we are gathering are accurate. We can’t be sure because the motion of the boat would affect the angle at which the sound from the M3 is emitted which would affect the angle of return and therefore depth measurements. A gyro compass would give us accurate measurements of heading, which is critical to determining the direction the boat is moving with very high precision. We hope to get these sensors soon so that we can continue investigating the cause(s) of submarine landslides in the Monterey Canyon.
 Having struggled with instrument troubleshooting, system setups, and constantly untangling cables, we gained a vast appreciation for marine technicians. Throughout this journey, we noticed that we couldn’t really find information about the inevitable struggles of setting up a new scientific system for the first time and decided to keep track of our trials and tribulations by way of a National Geographic Open Explorer Expedition. Read more here!
Having struggled with instrument troubleshooting, system setups, and constantly untangling cables, we gained a vast appreciation for marine technicians. Throughout this journey, we noticed that we couldn’t really find information about the inevitable struggles of setting up a new scientific system for the first time and decided to keep track of our trials and tribulations by way of a National Geographic Open Explorer Expedition. Read more here!

You can subscribe to our Open Explorer page to receive updates when we reach new milestones (or more likely encounter new challenges). The Open Explorer page was also a part of a National Geographic Competition to win an underwater drone (aka remotely operated vehicle (ROV)), which we found out that we won! We hope that the underwater drone will provide a method of validating our seafloor mapping data once we’ve gathered the rest of the equipment we need, as well as prove useful for the rest of the MLML community.
Finally, we’d like to thank MLML for their amazing support in following our Open Explorer Expedition. We grew from 2 to 76 followers in two days, and are overwhelmed with the amount of help from our small community.